


The International Conference on Multibody Systems, Nonlinear Dynamics, and Control (MSNDC) is held annually at the ASME IDETC-CIE Conference, and is a premier meeting event for professional networking and research exchange across the multibody systems and nonlinear dynamics technical community. The conference facilitates the dissemination of fundamental research in the enabling disciplines as well as research into their application to engineered or naturally occurring mechanical systems across all length and time scales. CREB’s researcher, Josep Maria Font, participated in the congress on August 15th with a keynote lecture, entitled: “Biomechanics of Human Movement: From Multibody Dynamic Simulation to Clinical Practice.”
Biomechanics of Human Movement: From Multibody Dynamic Simulation to Clinical Practice
In the last decade, there has been an exponential growth in the number of rehabilitation and assistive technologies for people with neuromuscular impairments. Such technologies range from wearable human movement monitoring devices to exoskeletons and rehabilitation robots aimed at maximizing motor function recovery. Most of these technologies require a comprehension of mechanical aspects of the human neuromusculoskeletal system and its interaction with the device, which can be modelled by means of multibody dynamics techniques.
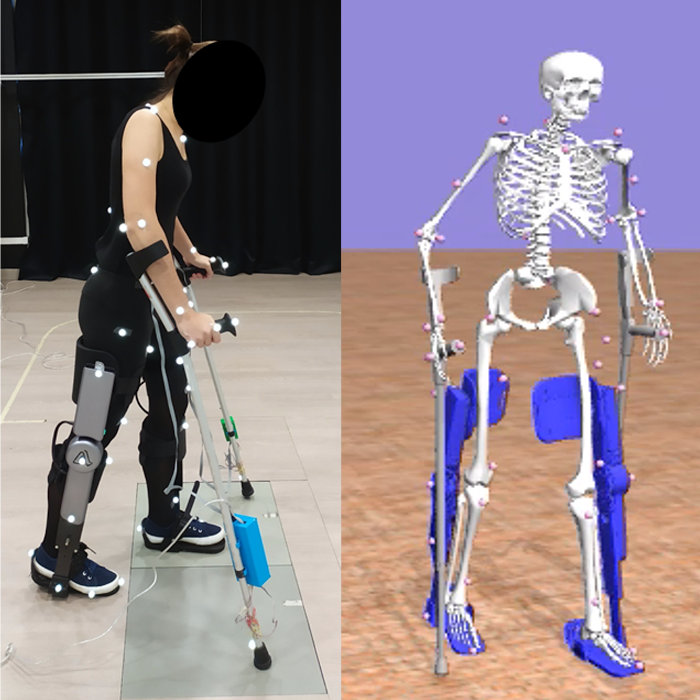
The keynote lecture explored how multibody human models could be used in clinical practice to improve diagnosis and treatment of patients with movement disorders. Particularly, the lecture discussed the different steps and challenges involved in the development of personalized neuromusculoskeletal models. Moreover, attention was paid on how these models can be used to predict physically-consistent novel motions. Finally, two application examples that could potentially be used in real clinical practice were presented. The first example was a computational approach to personalize controller parameters for a knee-powered lower limb exoskeleton that actively assists walking in people with spinal cord injury. The proposed method could be a better choice compared to the current trial-and-error approach based on the therapist experience. The second example was an IMU-based wearable system to capture arm kinematics in real-life conditions for pediatric patients with muscular dystrophy. This device runs a multibody kinematic model to quantify objective biomechanical metrics that could help clinicians monitor disease progression and treatment efficacy, and guide therapy decisions to maximize the patient’s mobility.

Josep Maria Font Llagunes
Josep M. Font-Llagunes is Full Professor of Mechanical Engineering at Universitat Politècnica de Catalunya (UPC). He is also the Director of the UPC Doctoral School and the Biomechanical Engineering Lab (BIOMEC). Prof. Font-Llagunes’ lab develops computational methods for the analysis and prediction of human movement, innovative robotic exoskeletons for gait assistance, and wearable monitoring technology for rehabilitation. He has published more than 40 articles in indexed journals, 130 conference papers, and has supervised or co-supervised 7 PhD theses. He is Editorial Board member of the journal Multibody System Dynamics, and currently chairs the Technical Committee for Multibody Dynamics of IFToMM. Prof. Font-Llagunes also co-founded the company ABLE Human Motion, which develops exoskeleton technology for people with mobility impairments. His work has been recognized by several awards, such as the Agustín de Betancourt y Molina Medal awarded by the Spanish Royal Academy of Engineering, the OpenSim Outstanding Researcher Award, the Leonardo Grant by the BBVA Foundation, and the UPC Award for Social Commitment.