

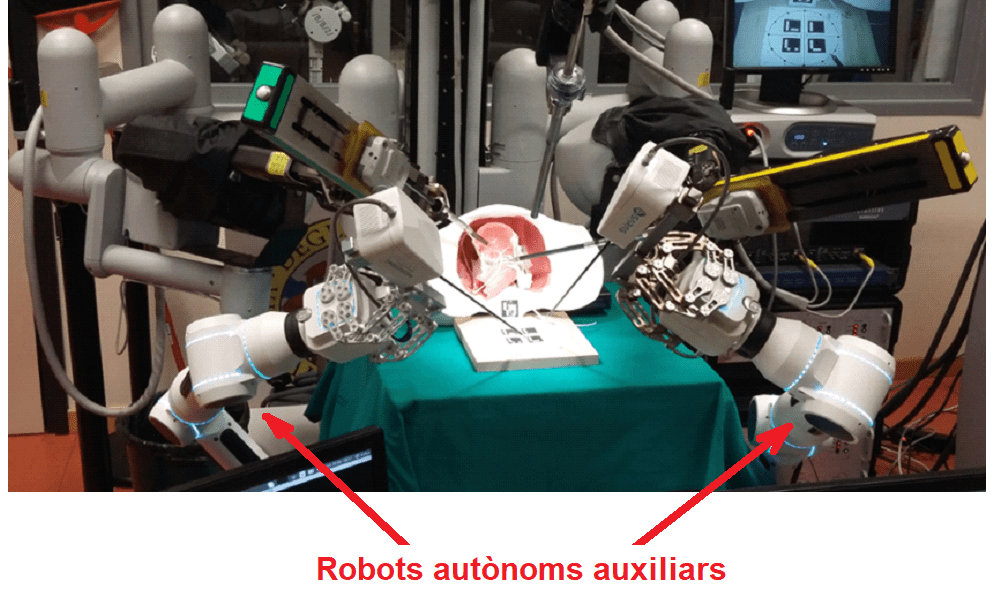
Aquest desembre de 2021 acaba el projecte Europeu, SARAS (Smart Autonomous Robot Assistant Surgeons) desenvolupat pel consorci integrat per la Universitat de Verona, Universitat de Modena, Universitat de Ferrara, Ospedale San Raffaele de Milà, Universitat de Dundee, Universitat de Brookes, Medineering Surgical Robotics i ACMIT Austrian Center i la UPC, a través del grup de robòtica i visió del CREB. Des del CREB s’ha contribuït al desenvolupament d’un sistema de control d’uns robots auxiliars dotats d’autonomia que permetin assistir al cirurgià en cirurgia robòtica per teleoperació, suplint així les tasques auxiliars que normalment fa un cirurgià assistent. Mentre la cirurgia la realitza pròpiament el cirurgià principal, el poder alliberar un cirurgià assistent de la tasca rutinària i poc activa dels braços auxiliars necessaris durant la cirurgia, evitarà mal aprofitar l‘expertesa i les capacitats d’aquests professionals. Per aconseguir-ho els robots auxiliars han de conèixer el procediment quirúrgic bàsic i poder interpretar en cada moment en quina fase del procés s’està per poder decidir en front l’actuació del cirurgià principal quina actuació d’assistència cal. Aquests ajuts poden ser del tipus apartar un òrgan o aguantar una agulla de sutura.
La tasca que el CREB ha portat a terme en els darrers quatre anys en aquest projecte, s’ha centrat en verificar l’efectivitat assolida en un camp quirúrgic sintètic, efectuant una prostatectomia radical. La feina ha comportat modelitzar el procediment, establir les regles d’actuació i efectuar la tasca d’integrar-ho en la plataforma DaVinci Research Kit, una plataforma de robot quirúrgic teleoperat orientat a la recerca en tècniques d’assistència robòtica en cirurgia.
Tot i els avenços aconseguits, queda un llarg camí per estendre-ho a altres cirurgies per a la seva generalització, així com la tasca d’apropar-ho al mercat, que seran els següents passos que vol afrontar aquest consorci, que ha estat finançat pel programa Horizon 2020 Research and Innovation.