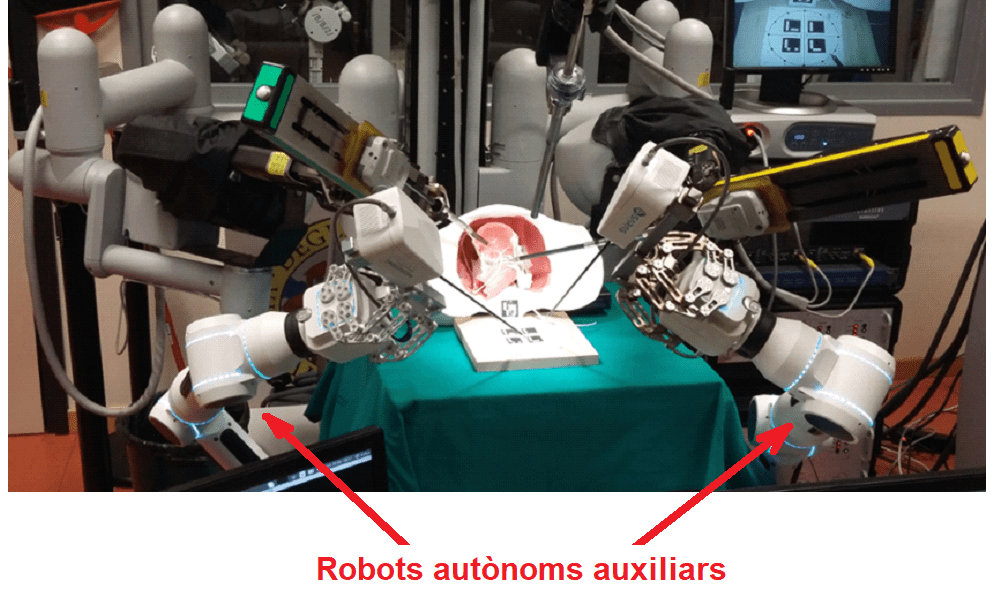
La tasca que el CREB ha portat a terme en els darrers quatre anys en aquest projecte, s’ha centrat en verificar l’efectivitat assolida en un camp quirúrgic sintètic, efectuant una prostatectomia radical. La feina ha comportat modelitzar el procediment, establir les regles d’actuació i efectuar la tasca d’integrar-ho en la plataforma DaVinci Research Kit, una plataforma de robot quirúrgic teleoperat orientat a la recerca en tècniques d’assistència robòtica en cirurgia.