

In the medical field, the clinicians seek instruments to quantitatively assess the patient’s movement to evaluate the progression of the disease. In the motion analysis field, there are different tools to quantify the movement: goniometer, the optoelectronic motion capture and wearable sensor. All of them have positive and negative aspects but latterly the wearable sensors are gaining popularity thanks to some of their main characteristics like small dimension, light weight and reduced price. In particular, the IMUs have gained popularity because they allow for a quantitative and objective analysis outside the laboratory. In this context, the ArmTracker will represent a useful device to objectively assess and continuously monitor the motor function of the upper limb in children with DMD and SMA.

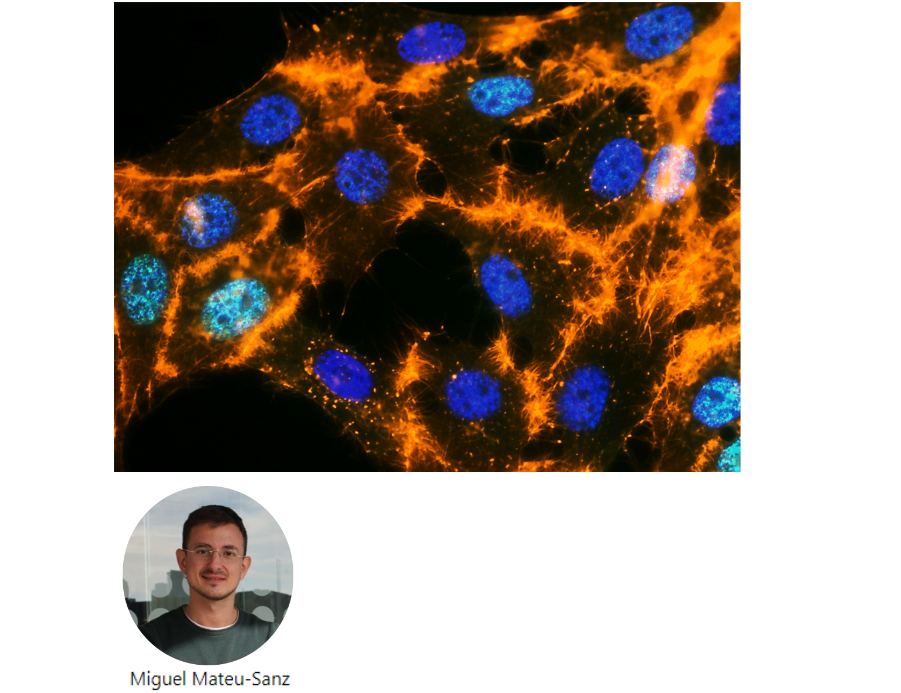
Osteosarcoma (OS) is the most common type of bone tumor which appears in long bones and mainly affects children, adolescents and young adults. Despite its low incidence, it is ranked among the most frequent cause of cancer-related death in child. Current therapy for OS consist in surgical resection of the tumor, combined with chemotherapy or radiation, but patient survival still remains relatively low (50-60%) and it is associated with systemic toxicity and side effects. For these reasons, innovative anti-cancer therapies are of interest.
Cold atmospheric plasmas (CAP) are a highly reactive state of the matter that can be created by applying an electrical discharge to a gas. CAP are a source of reactive molecules, UV and electromagnetic fields that can be employed for different biomedical purposes, like antimicrobial sterilization and wound healing. Recently, CAP have also been suggested to target a wide range cancer cells without damaging healthy cells and tissues.
Although further investigations are needed, the results of the present work provide evidence of PCL as a promising tool for OS treatment.
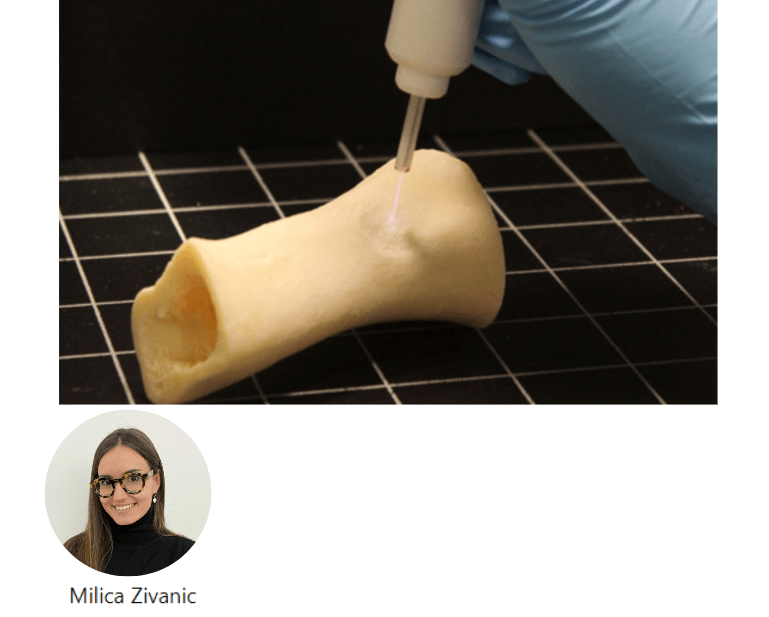
Plasma is often found in the universe (stars) where high temperatures and pressures are very common. However, scientists have found a way to generate weakly ionized plasma at near-room temperature and atmospheric pressure. Such plasma is called cold atmospheric plasma and is safe to be applied directly to the cells and tissues. In the last decades, cold plasma has found numerous medically relevant uses, from wound healing and disinfection to cancer treatment. Despite its promise, plasma is facing different clinical limitations.
Currently, there are two plasma treatment modalities: direct treatment and plasma-treated liquids. In direct treatment, the treatment target is directly exposed to a source of plasma, which is not very convenient for the treatment of internal tumors as it would require surgery. On the other hand, plasma-treated liquids can be injected to treat internal tumors in a non-invasive manner. However, liquids may be quickly diluted and washed away by the body liquids.
Hydrogels may allow to combine plasma technology with tissue-engineering or drug delivery to broaden and improve clinical utility of plasma technology in the future.
La ingeniería biomédica combina los criterios de diseño en ingeniería y las herramientas de análisis provenientes de las matemáticas, la física y la química persiguiendo la resolución de problemas en áreas como la medicina, biología, biotecnología y farmacia. Podría definirse, brevemente, como la aplicación de los principios de la ingeniería a las ciencias de la vida. En este artículo se recoge la trayectoria del Dr. Pere Caminal Magrans, uno de los pioneros e impulsores de la ingeniería biomédica en España y sin el cuál, no habríamos llegado hasta el momento actual.

Arm2U és un equip universitari fundat el 2018 a Barcelona, actualment situat al Campus ETSEIB de la Universitat Politècnica de Catalunya (UPC). L'equip consisteix en un grup multidisciplinari d'estudiants d'Enginyeria de postgrau i de grau que comparteixen l'ambició d'empènyer els límits de la indústria protètica. L'equip se centra en el disseny i construcció d'una pròtesi mioelèctrica de l'extremitat superior del cos humà. Aquesta pròtesi està enfocada en complir els requisits de Cybathlon i en adaptar-se en els diferents pilots que col·laboren amb el projecte. Així i tot, l'equip no cerca únicament obtenir una pròtesi per a satisfer les bases de la competició i superar les seves proves de manera satisfactòria, sinó que es consideren també els diferents aspectes de la rutina dels possibles usuaris, perquè l'artefacte es pugui adaptar i arribar a ser realment funcional en l'ús diari.
